Rosenbrock Function
For a description of the Rosenbrock function minimization problem, see the JupyterLab notebook documentation for this problem.
The python script in this example can be executed from the command line with:
$ python -m yapss.examples.rosenbrock
Functions
YAPSS solution to the minimization of the Rosenbrock function.
Code
"""
YAPSS solution to the minimization of the Rosenbrock function.
"""
__all__ = ["main", "plot_rosenbrock", "setup"]
import numpy as np
# third party imports
from matplotlib import pyplot as plt
# package imports
from yapss import ObjectiveArg, Problem
def setup() -> Problem:
"""Set up the problem to minimize the Rosenbrock problem.
Returns
-------
problem : Problem
The Rosenbrock function minimization problem.
"""
# problem has no dynamic phases, and 2 parameters
problem = Problem(name="Rosenbrock", nx=[], ns=2)
def objective(arg: ObjectiveArg) -> None:
"""Rosenbrock objective callback function."""
x0, x1 = arg.parameter
arg.objective = 100 * (x1 - x0**2) ** 2 + (1 - x0) ** 2
problem.functions.objective = objective
# guess
problem.guess.parameter = -1.2, 1.0
# yapss options
problem.derivatives.order = "second"
problem.derivatives.method = "auto"
# ipopt options
problem.ipopt_options.tol = 1e-20
problem.ipopt_options.print_level = 5
return problem
def plot_rosenbrock() -> None:
"""Make a contour plot of the Rosenbrock function."""
x0 = np.linspace(-2, 2, 400)
x1 = np.linspace(-1, 3, 400)
x0_grid, x1_grid = np.meshgrid(x0, x1)
f = 100 * (x1_grid - x0_grid**2) ** 2 + (1 - x0_grid) ** 2
plt.figure(1)
levels = [1, 3, 10, 30, 100, 300, 1000, 3000]
cp = plt.contour(x0, x1, f, levels, colors="black", linewidths=0.5)
plt.clabel(cp, inline=1, fontsize=8)
plt.plot(1, 1, ".r", markersize=10)
plt.xlabel(r"$x_0$")
plt.ylabel(r"$x_1$")
plt.title("Rosenbrock function")
plt.xticks(range(-2, 3))
plt.yticks(range(-1, 4))
plt.tight_layout()
def main() -> None:
"""Demonstrate the solution to the Rosenbrock function minimization problem."""
ocp = setup()
ocp.derivatives.method = "auto"
ocp.derivatives.order = "first"
ocp.ipopt_options.print_level = 5
solution = ocp.solve()
x_opt = solution.parameter
plt.figure()
print(f"\nThe optimal solution is at the point x = ({x_opt[0]}, {x_opt[1]})")
plot_rosenbrock()
plt.show()
if __name__ == "__main__":
main()
Text Output
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
This is Ipopt version 3.14.11, running with linear solver spral.
Number of nonzeros in equality constraint Jacobian...: 0
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 0
Total number of variables............................: 2
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 0
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 2.4200000e+01 0.00e+00 2.16e+02 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 5.1011127e+00 0.00e+00 3.83e+01 -20.3 2.16e+02 - 1.00e+00 9.77e-04f 11
2 4.1537855e+00 0.00e+00 6.66e+00 -20.3 3.17e-02 - 1.00e+00 1.00e+00f 1
3 4.1172110e+00 0.00e+00 1.41e+00 -20.3 6.68e-03 - 1.00e+00 1.00e+00f 1
4 4.1138478e+00 0.00e+00 1.41e+00 -20.3 1.69e-03 - 1.00e+00 1.00e+00f 1
5 4.1104835e+00 0.00e+00 1.41e+00 -20.3 1.70e-03 - 1.00e+00 1.00e+00f 1
6 4.1071181e+00 0.00e+00 1.41e+00 -20.3 1.70e-03 - 1.00e+00 1.00e+00f 1
7 4.0822962e+00 0.00e+00 9.98e+00 -20.3 1.41e+00 - 1.00e+00 3.12e-02f 6
8 3.8443255e+00 0.00e+00 3.06e+01 -20.3 7.47e-01 - 1.00e+00 1.00e+00f 1
9 3.6988415e+00 0.00e+00 5.33e+00 -20.3 5.80e-01 - 1.00e+00 1.00e+00f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
10 3.3152088e+00 0.00e+00 2.27e+00 -20.3 1.68e-01 - 1.00e+00 1.00e+00f 1
11 2.9568858e+00 0.00e+00 7.41e+00 -20.3 1.84e-01 - 1.00e+00 1.00e+00f 1
12 2.9202278e+00 0.00e+00 1.86e+01 -20.3 4.84e-01 - 1.00e+00 5.00e-01f 2
13 2.7122136e+00 0.00e+00 9.58e+00 -20.3 1.15e-01 - 1.00e+00 1.00e+00f 1
14 2.5807322e+00 0.00e+00 7.78e+00 -20.3 3.40e-02 - 1.00e+00 1.00e+00f 1
15 2.3268760e+00 0.00e+00 1.50e+01 -20.3 3.01e-01 - 1.00e+00 1.00e+00f 1
16 2.0281526e+00 0.00e+00 2.76e+00 -20.3 1.47e-01 - 1.00e+00 1.00e+00f 1
17 1.8126691e+00 0.00e+00 3.81e+00 -20.3 8.02e-02 - 1.00e+00 1.00e+00f 1
18 1.6383532e+00 0.00e+00 8.83e+00 -20.3 5.69e-01 - 1.00e+00 2.50e-01f 3
19 1.4959030e+00 0.00e+00 4.54e+00 -20.3 2.15e-02 - 1.00e+00 1.00e+00f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
20 1.1803097e+00 0.00e+00 3.26e+00 -20.3 1.28e-01 - 1.00e+00 1.00e+00f 1
21 1.0292074e+00 0.00e+00 9.27e+00 -20.3 1.72e-01 - 1.00e+00 1.00e+00f 1
22 7.5166671e-01 0.00e+00 1.80e+00 -20.3 5.58e-02 - 1.00e+00 1.00e+00f 1
23 6.0644063e-01 0.00e+00 6.82e+00 -20.3 1.67e-01 - 1.00e+00 1.00e+00f 1
24 5.2258332e-01 0.00e+00 1.45e+00 -20.3 1.91e-02 - 1.00e+00 1.00e+00f 1
25 4.0323347e-01 0.00e+00 1.65e+00 -20.3 8.96e-02 - 1.00e+00 1.00e+00f 1
26 3.3584793e-01 0.00e+00 5.09e+00 -20.3 2.18e-01 - 1.00e+00 5.00e-01f 2
27 2.4948751e-01 0.00e+00 2.19e+00 -20.3 4.75e-02 - 1.00e+00 1.00e+00f 1
28 1.9589467e-01 0.00e+00 6.24e+00 -20.3 1.41e-01 - 1.00e+00 1.00e+00f 1
29 1.2414558e-01 0.00e+00 9.25e-01 -20.3 2.76e-02 - 1.00e+00 1.00e+00f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
30 8.0268179e-02 0.00e+00 1.11e+00 -20.3 9.55e-02 - 1.00e+00 1.00e+00f 1
31 6.5323884e-02 0.00e+00 4.20e+00 -20.3 1.88e-01 - 1.00e+00 5.00e-01f 2
32 4.4521129e-02 0.00e+00 1.77e+00 -20.3 2.36e-02 - 1.00e+00 1.00e+00f 1
33 2.0462411e-02 0.00e+00 1.65e+00 -20.3 1.14e-01 - 1.00e+00 1.00e+00f 1
34 9.0735624e-03 0.00e+00 8.46e-01 -20.3 7.55e-02 - 1.00e+00 1.00e+00f 1
35 3.6184056e-03 0.00e+00 1.30e+00 -20.3 7.98e-02 - 1.00e+00 1.00e+00f 1
36 2.7049277e-03 0.00e+00 1.47e+00 -20.3 4.30e-01 - 1.00e+00 6.25e-02f 5
37 1.6821951e-04 0.00e+00 3.29e-01 -20.3 4.99e-02 - 1.00e+00 1.00e+00f 1
38 5.1511289e-05 0.00e+00 1.44e-01 -20.3 7.50e-03 - 1.00e+00 1.00e+00f 1
39 1.4954442e-06 0.00e+00 4.89e-02 -20.3 1.22e-02 - 1.00e+00 1.00e+00f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
40 4.4755734e-07 0.00e+00 2.42e-02 -20.3 4.33e-04 - 1.00e+00 1.00e+00f 1
41 1.1094519e-10 0.00e+00 2.44e-05 -20.3 5.50e-04 - 1.00e+00 1.00e+00f 1
42 2.3488989e-13 0.00e+00 5.82e-06 -20.3 2.20e-05 - 1.00e+00 1.00e+00f 1
43 2.4752797e-14 0.00e+00 6.29e-06 -20.3 9.04e-07 - 1.00e+00 1.00e+00f 1
44 1.3467623e-14 0.00e+00 2.76e-06 -20.3 4.17e-07 - 1.00e+00 5.00e-01f 2
45 5.4799074e-18 0.00e+00 3.93e-08 -20.3 1.91e-07 - 1.00e+00 1.00e+00f 1
46 6.9464343e-21 0.00e+00 2.72e-09 -20.3 4.35e-09 - 1.00e+00 1.00e+00f 1
47 3.1166059e-23 0.00e+00 2.01e-10 -20.3 9.20e-11 - 1.00e+00 1.00e+00f 1
48 4.2436960e-24 0.00e+00 1.96e-11 -20.3 1.77e-11 - 1.00e+00 5.00e-01f 2
49 6.5741400e-26 0.00e+00 7.16e-12 -20.3 4.38e-12 - 1.00e+00 1.00e+00f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
50 5.1615662e-27 0.00e+00 2.76e-12 -20.3 3.27e-13 - 1.00e+00 1.00e+00f 1
51 1.0374014e-27 0.00e+00 7.64e-13 -20.3 9.32e-14 - 1.00e+00 1.00e+00f 1
52 4.9747541e-29 0.00e+00 1.21e-13 -20.3 6.48e-14 - 1.00e+00 1.00e+00f 1
53 6.7053177e-30 0.00e+00 8.62e-14 -20.3 1.56e-14 - 1.00e+00 1.00e+00f 1
54 5.2385294e-30 0.00e+00 8.77e-14 -20.3 4.21e-15 - 1.00e+00 1.00e+00 0
55 5.1275959e-30 0.00e+00 8.79e-14 -20.3 2.50e-15 - 1.00e+00 1.00e+00T 0
56 5.1275959e-30 0.00e+00 8.79e-14 -20.3 8.79e-14 - 1.00e+00 1.16e-10f 34
57 5.1275959e-30 0.00e+00 8.79e-14 -20.3 8.79e-14 - 1.00e+00 1.16e-10f 34
58 5.1275959e-30 0.00e+00 8.79e-14 -20.3 8.79e-14 - 1.00e+00 1.16e-10f 34
59 5.1275959e-30 0.00e+00 8.79e-14 -20.3 8.79e-14 - 1.00e+00 1.16e-10f 34
Number of Iterations....: 59
(scaled) (unscaled)
Objective...............: 5.1275958839365767e-30 5.1275958839365767e-30
Dual infeasibility......: 8.7929663550312436e-14 8.7929663550312436e-14
Constraint violation....: 0.0000000000000000e+00 0.0000000000000000e+00
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 0.0000000000000000e+00 0.0000000000000000e+00
Overall NLP error.......: 8.7929663550312436e-14 8.7929663550312436e-14
Number of objective function evaluations = 270
Number of objective gradient evaluations = 60
Number of equality constraint evaluations = 0
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 0
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 0
Total seconds in IPOPT (w/o function evaluations) = 0.055
Total seconds in NLP function evaluations = 0.031
EXIT: Solved To Acceptable Level.
The optimal solution is at the point x = (1.0000000000000004, 1.000000000000001)
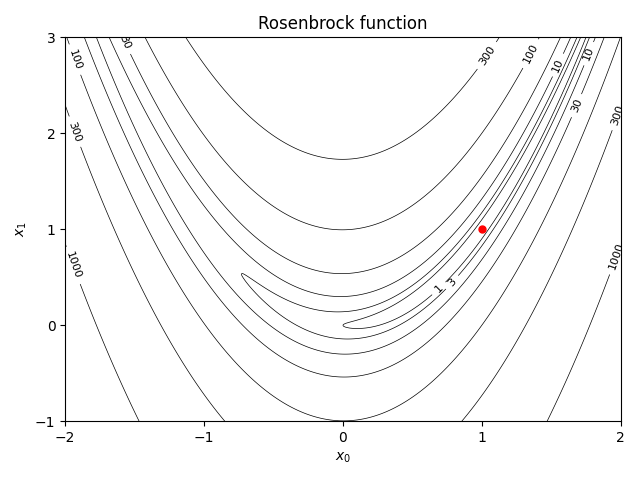
Plots
Plotted below is a contour plot of the Rosenbrock function, with the minimum indicated by a red dot. Note that the minimum lies is a long, narrow valley, which makes optimization difficult.