Minimum Time to Climb Problem
For a description of the minimum time to climb problem, see the JupyterLab notebook documentation for this problem.
The python script in this example can be executed from the command line with:
$ python -m yapss.examples.minimum_time_to_climb
Functions
YAPSS solution of the minimum time to climb problem.
See Arthur E. Bryson Jr., Mukund N. Desai, and William C. Hoffman. Energy-state approximation in performance optimization of supersonic aircraft. Journal of Aircraft, 6(6):481-488, 1969. doi:10.2514/3.44093.
- plot_solution(solution: Solution, *, plot_energy_contours: bool = False) None[source]
Plot the solution to the optimal control problem.
- The seven plots are:
Each of the four states (altitude \(h\), velocity \(v\), flight path angle \(\gamma\), and mass \(m\)) vs. time \(t\)
The control variable angle of attack \(\alpha\) vs. time \(t\)
The trajectory of the aircraft, altitude \(h\) vs. velocity \(v\)
The Hamiltonian \(\mathcal{H} = \lambda^T f\) vs. time \(t\)
- Parameters:
- solutionSolution
The solution to the minimum time to climb optimal control problem.
- plot_energy_contoursOptional[bool]
If
True, plot contours of constant total energy and excess power.
- setup(*, min_fuel: bool = False) Problem[source]
Set up the Bryson minimum time to climb problem or related minimum fuel to climb problem.
- Parameters:
- min_fuelbool
Truefor the minimum fuel to climb problem,Falsefor the minimum time to climb problem.
- Returns:
- ocpProblem
The minimum time to climb optimal control problem.
Code
"""
YAPSS solution of the minimum time to climb problem.
See Arthur E. Bryson Jr., Mukund N. Desai, and William C. Hoffman. Energy-state approximation
in performance optimization of supersonic aircraft. Journal of Aircraft, 6(6):481-488, 1969.
doi:10.2514/3.44093.
"""
# N806 Variable in function should be lowercase
# ruff: noqa: N806
__all__ = [
"main",
"plot_cd0",
"plot_density",
"plot_eta",
"plot_lift_curve_slope",
"plot_solution",
"plot_solution",
"plot_speed_of_sound",
"setup",
]
# standard library imports
from math import pi
# third party imports
import matplotlib.pyplot as plt
import numpy as np
from numpy.typing import NDArray
from scipy.interpolate import CubicSpline, RBFInterpolator
# package imports
from yapss import ContinuousArg, ObjectiveArg, Problem, Solution
# because we can only use central differences, it's safe to use numpy math
cos = np.cos
sin = np.sin
def objective(arg: ObjectiveArg) -> None:
"""Bryson minimum time to climb objective function.
Parameters
----------
arg : ObjectiveArg
Returns
-------
None
"""
if arg.auxdata.min_fuel:
arg.objective = -arg.phase[0].final_state[3]
else:
arg.objective = arg.phase[0].final_time
def continuous(arg: ContinuousArg) -> None:
"""Bryson minimum time to climb continuous dynamics function.
Parameters
----------
arg : ContinuousArg
Returns
-------
None
"""
h, v, gamma, mass = arg.phase[0].state
(alpha,) = arg.phase[0].control
S = arg.auxdata.S
g0 = arg.auxdata.g0
Isp = arg.auxdata.Isp
rho = get_rho(h)
c = get_c(h)
mach = v / c
CD0 = get_cd0(mach)
Clalpha = get_cla(mach)
eta = get_eta(mach)
thrust = thrust_function(mach, h)
CD = CD0 + eta * Clalpha * alpha**2
CL = Clalpha * alpha
q = 0.5 * rho * v**2
D = q * S * CD
L = q * S * CL
hdot = v * sin(gamma)
vdot = (thrust * cos(alpha) - D) / mass - g0 * sin(gamma)
gammadot = (thrust * sin(alpha) + L - mass * g0 * cos(gamma)) / (mass * v)
mdot = -thrust / (g0 * Isp)
arg.phase[0].dynamics[:] = hdot, vdot, gammadot, mdot
def setup(*, min_fuel: bool = False) -> Problem:
"""Set up the Bryson minimum time to climb problem or related minimum fuel to climb problem.
Parameters
----------
min_fuel : bool
``True`` for the minimum fuel to climb problem, ``False`` for the
minimum time to climb problem.
Returns
-------
ocp : Problem
The minimum time to climb optimal control problem.
"""
ocp = Problem(name="Bryson Minimum Time to Climb", nx=[4], nu=[1])
# user functions
ocp.functions.objective = objective
ocp.functions.continuous = continuous
# auxdata
ocp.auxdata.min_fuel = min_fuel
ocp.auxdata.S = 530
ocp.auxdata.g0 = 32.174
ocp.auxdata.Isp = 1600
# initial and final conditions
t0 = 0
h0, v0, gamma_0, m0 = 0.0, 424.260, 0.0, 42000.0 / ocp.auxdata.g0
hf, vf, gamma_f = 65600, 968.148, 0.0
# variable ranges
tf_min, tf_max = 100, 800
h_min, h_max = 0, 69000
v_min, v_max = 1, 2000
gamma_min = -40 * pi / 180
gamma_max = 40 * pi / 180
m_min, m_max = 10, 45000 / ocp.auxdata.g0
alpha_min, alpha_max = -pi / 4, pi / 4
# bounds
bounds = ocp.bounds.phase[0]
bounds.initial_time.lower = bounds.initial_time.upper = t0
bounds.final_time.lower = tf_min
bounds.final_time.upper = tf_max
bounds.initial_state.lower = bounds.initial_state.upper = h0, v0, gamma_0, m0
bounds.state.lower = h_min, v_min, gamma_min, m_min
bounds.state.upper = h_max, v_max, gamma_max, m_max
bounds.final_state.lower = hf, vf, gamma_f, m_min
bounds.final_state.upper = hf, vf, gamma_f, m_max
bounds.control.lower = (alpha_min,)
bounds.control.upper = (alpha_max,)
# guess
guess = ocp.guess.phase[0]
guess.time = [0, 300]
guess.state = [[h0, hf], [v0, vf], [gamma_0, gamma_f], [m0, m0]]
guess.control = [[0, 0]]
# derivatives -- must use central difference, since tables are not differentiable
ocp.derivatives.method = "central-difference"
# scaling
ocp.scale.phase[0].dynamics = ocp.scale.phase[0].state = 30000.0, 1000.0, 3.0, 500.0
ocp.scale.phase[0].control[:] = (0.2,)
ocp.scale.objective = 200
ocp.scale.phase[0].time = 200
# solver options
ocp.ipopt_options.max_iter = 1000
ocp.derivatives.order = "second"
ocp.ipopt_options.tol = 1e-8
ocp.ipopt_options.print_level = 3
# mesh
m, n = 15, 15
ocp.mesh.phase[0].collocation_points = m * (n,)
ocp.mesh.phase[0].fraction = m * (1.0 / m,)
return ocp
# mach number array, and altitude array in thousands of feet
mach_data = np.array((0.0, 0.2, 0.4, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6, 1.8))
h_data: NDArray[np.float64] = np.array((0, 5, 10, 15, 20, 25, 30, 40, 50, 70), dtype=float)
# normalize so that each array has range [0,1]
h_data /= 70.0
mach_data /= 1.8
# Thrust data. Note that there are zero entries where the data is unknown or
# undefined. Thrust is in thousands of lbf.
# fmt:off
thrust_data = np.array(
[[24.2, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[28.0, 24.6, 21.1, 18.1, 15.2, 12.8, 10.7, 0, 0, 0],
[28.3, 25.2, 21.9, 18.7, 15.9, 13.4, 11.2, 7.3, 4.4, 0],
[30.8, 27.2, 23.8, 20.5, 17.3, 14.7, 12.3, 8.1, 4.9, 0],
[34.5, 30.3, 26.6, 23.2, 19.8, 16.8, 14.1, 9.4, 5.6, 1.1],
[37.9, 34.3, 30.4, 26.8, 23.3, 19.8, 16.8, 11.2, 6.8, 1.4],
[36.1, 38.0, 34.9, 31.3, 27.3, 23.6, 20.1, 13.4, 8.3, 1.7],
[ 0, 36.6, 38.5, 36.1, 31.6, 28.1, 24.2, 16.2, 10.0, 2.2],
[ 0, 0, 0, 38.7, 35.7, 32.0, 28.1, 19.3, 11.9, 2.9],
[ 0, 0, 0, 0, 0, 34.6, 31.1, 21.7, 13.3, 3.1]],
) # fmt:on
# convert to lbf
thrust_data *= 1000
# Find non-empty entries in thrust table, and form argument and value arrays for the
# radial basis function interpolator
thrust_table = []
mh = []
for j, mj in enumerate(mach_data):
for k, hk in enumerate(h_data):
thrust_data_point = thrust_data[j][k]
if thrust_data_point != 0:
thrust_table.append(thrust_data_point)
mh.append([mj, hk])
thrust_rbf_interpolator = RBFInterpolator(
mh,
thrust_table,
smoothing=0,
kernel="cubic",
)
def thrust_function(mach: NDArray[np.float64], h: NDArray[np.float64]) -> NDArray[np.float64]:
"""Determine the thrust available at the given mach numbers and altitudes.
Parameters
----------
mach : numpy.ndarray
Array of mach numbers
h : numpy.ndarray
Array of altitudes
Returns
-------
numpy.ndarray
The thrust for each altitude and airspeed pair.
"""
shape = mach.shape
length = 1
for i in shape:
length *= i
mach = mach.reshape([length])
h = h.reshape([length])
thrust = thrust_rbf_interpolator(np.stack([mach / 1.8, h / 70000], -1))
return np.array(thrust.reshape(shape), dtype=float)
# make splines of atmospheric data, using the U.S. 1976 Standard Atmosphere in US
# customary units. Data from: http://www.pdas.com/atmosTable1US.html
atmosphere_data = np.array(
# fmt:off
# h rho c
# -- -------- ------
[[ 0, 2.377E-3, 1116.5],
[ 5, 2.048E-3, 1097.1],
[10, 1.756E-3, 1077.4],
[15, 1.496E-3, 1057.4],
[20, 1.267E-3, 1036.9],
[25, 1.066E-3, 1016.1],
[30, 8.907E-4, 994.8],
[35, 7.382E-4, 973.1],
[40, 5.873E-4, 968.1],
[45, 4.623E-4, 968.1],
[50, 3.639E-4, 968.1],
[55, 2.865E-4, 968.1],
[60, 2.256E-4, 968.1],
[65, 1.777E-4, 968.1],
[70, 1.392E-4, 970.9],
[75, 1.091E-4, 974.3],
[80, 8.571E-5, 977.6],
[85, 6.743E-5, 981.0],
[90, 5.315E-5, 984.3]],
) # fmt:on
atmosphere_data[:, 0] *= 1000
get_rho = CubicSpline(atmosphere_data[:, 0], atmosphere_data[:, 1])
get_c = CubicSpline(atmosphere_data[:, 0], atmosphere_data[:, 2])
# cubic splines of areodynamic parameters. In order to get desired results, some
# spline points are doubled, effectively forcing the slope at those points to be zero.
# Plots of the resulting spline functions show that the desired result is obtained.
eps = 1e-5
# lift curve slope (CLalpha)
mach_cla = [0, 0.4, 0.8, 0.84 - eps, 0.84, 0.9, 1.0, 1.2, 1.4, 1.6, 1.8]
cla = [3.44, 3.44, 3.44, 3.44, 3.44, 3.58, 4.44, 3.44, 3.01, 2.86, 2.44]
get_cla = CubicSpline(mach_cla, cla)
# baseline drag coefficient (CD0)
mach_cd0 = [0, 0.4, 0.8, 0.86 - eps, 0.86, 0.9, 1.0, 1.2, 1.4, 1.6, 1.8]
cd0 = [0.013, 0.013, 0.013, 0.013, 0.013, 0.014, 0.031, 0.041, 0.039, 0.036, 0.035]
get_cd0 = CubicSpline(mach_cd0, cd0)
# eta
mach_eta = [
0,
0.4,
0.8 - eps,
0.8,
0.9,
1.0,
1.0 + eps,
1.2 - eps,
1.2,
1.4,
1.6,
1.6 + eps,
1.8 - eps,
1.8,
]
eta_data = [
0.54,
0.54,
0.54,
0.54,
0.75 - 0.01,
0.79,
0.79 - eps / 10,
0.78 + eps / 10,
0.78,
0.89,
0.93,
0.93,
0.93,
0.93,
]
get_eta = CubicSpline(mach_eta, eta_data)
plt.rc("font", family="sans-serif")
def get_excess_power(h: NDArray[np.float64], v: NDArray[np.float64]) -> NDArray[np.float64]:
"""Determine the excess power available to climb at each altitude `h` and airspeed `v`.
Parameters
----------
h : numpy.ndarray
Array of altitudes
v : numpy.ndarray
Array of velocities
Returns
-------
numpy.ndarray
The excess power in level flight for each altitude and airspeed
pair, in level flight.
"""
# use rough average weight to compute excess power
g0 = 32.174
m = 40000 / g0
S = 530
rho = get_rho(h)
c = get_c(h)
mach = v / c
CD0 = get_cd0(mach)
Clalpha = get_cla(mach)
eta = get_eta(mach)
qs = 0.5 * rho * v**2 * S
CL = m * g0 / qs
alpha = CL / Clalpha
CD = CD0 + eta * Clalpha * alpha**2
D = qs * CD
thrust = thrust_function(mach, h)
return np.array((thrust - D) * v, dtype=float)
def plot_density() -> None:
r"""Plot air density :math:`\rho` vs. altitude :math:`h`."""
h = np.linspace(0.0, 70000.0, 100)
plt.plot(get_rho(h), h)
plt.xlabel(r"Density, $\rho$ (slug/ft$^3$)")
plt.ylabel(r"Altitude, $h$ (ft)")
plt.xlim([0.0, 0.0025])
plt.ylim([0.0, 70000.0])
plt.grid()
def plot_speed_of_sound() -> None:
"""Plot speed of sound :math:`c` vs. altitude :math:`h`."""
h = np.linspace(0.0, 70000.0, 100)
plt.plot(get_c(h), h)
plt.xlabel(r"Speed of sound, $c$ (m/s)")
plt.ylabel(r"Altitude, $h$ (ft)")
plt.xlim([960.0, 1120.0])
plt.ylim([0.0, 70000.0])
plt.grid()
def plot_lift_curve_slope() -> None:
r"""Plot lift curve :math:`C_{L_\alpha}` slope vs. Mach number :math:`M`."""
mach = np.linspace(0, 1.8, 100)
plt.plot(mach, get_cla(mach))
plt.plot(mach_cla, cla, ".", markersize=10)
plt.ylabel(r"Lift curve slope, $C_{L_{\alpha}}$")
plt.xlabel(r"Mach number, $M$")
plt.xlim([0.0, 1.8])
plt.ylim([2, 5])
plt.grid()
def plot_cd0() -> None:
"""Plot :math:`C_{D_0}` vs. Mach Number :math:`M`."""
mach = np.linspace(0, 1.8, 100)
plt.plot(mach, get_cd0(mach))
plt.plot(mach_cd0, cd0, ".", markersize=10)
plt.ylabel(r"Baseline drag coefficient, $C_{D_{0}}$")
plt.xlabel(r"Mach number, $M$")
plt.xlim([0.0, 1.8])
plt.ylim([0.01, 0.045])
plt.grid()
def plot_eta() -> None:
r"""Plot the induced drag coefficient :math:`\eta` vs. Mach number :math:`M`."""
mach = np.linspace(0, 1.8, 100)
plt.plot(mach, get_eta(mach))
plt.plot(mach_eta, eta_data, ".", markersize=10)
plt.ylabel(r"Induced drag coefficient, $\eta$")
plt.xlabel(r"Mach number, $M$")
plt.xlim([0.0, 1.8])
plt.ylim([0.5, 0.95])
plt.grid()
def plot_solution(solution: Solution, *, plot_energy_contours: bool = False) -> None:
r"""Plot the solution to the optimal control problem.
The seven plots are:
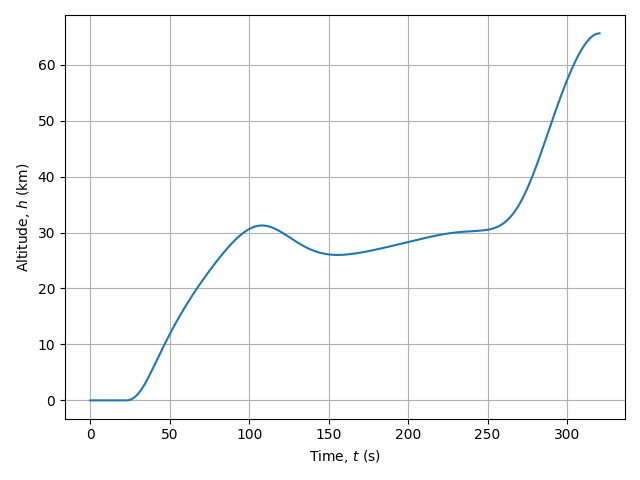
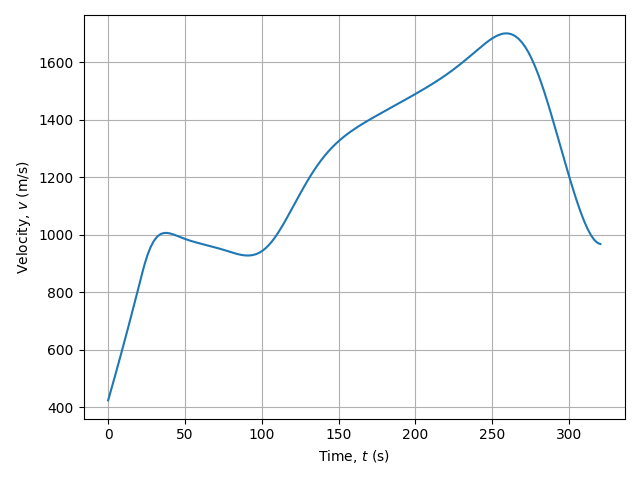
* Each of the four states (altitude :math:`h`, velocity :math:`v`, flight
path angle :math:`\gamma`, and mass :math:`m`) vs. time :math:`t`
* The control variable angle of attack :math:`\alpha` vs. time :math:`t`
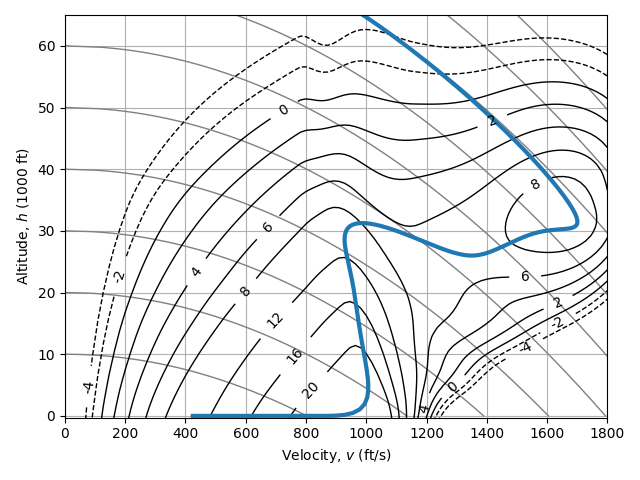
* The trajectory of the aircraft, altitude :math:`h` vs. velocity :math:`v`
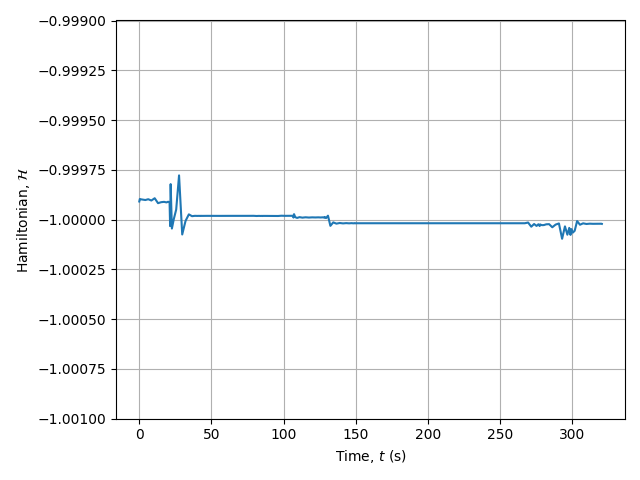
* The Hamiltonian :math:`\mathcal{H} = \lambda^T f` vs. time :math:`t`
Parameters
----------
solution : Solution
The solution to the minimum time to climb optimal control problem.
plot_energy_contours : Optional[bool]
If ``True``, plot contours of constant total energy and excess power.
"""
h, v, gamma, mass = solution.phase[0].state
t = solution.phase[0].time
tc = solution.phase[0].time_c
alpha = solution.phase[0].control[0]
hamiltonian = solution.phase[0].hamiltonian
# trajectory
plt.figure(1)
# total energy contours
g0 = 32.174 # 9.80665
if plot_energy_contours:
for h_energy in np.linspace(10000, 100000, num=10, endpoint=True):
h_ = np.linspace(0, h_energy, num=250, endpoint=True)
v_ = np.sqrt(2 * g0 * (h_energy - h_))
plt.plot(v_, h_ / 1000, "grey", linewidth=1)
# excess power contours
h_grid = np.linspace(-1000, 70000, num=100, dtype=np.float64)
v_grid = np.linspace(0.1, 1800, num=100, dtype=np.float64)
v_grid, h_grid = np.meshgrid(v_grid, h_grid)
power = get_excess_power(h_grid, v_grid)
cp = plt.contour(
v_grid,
h_grid / 1000,
power / 1e6,
[-4, -2, 0, 2, 4, 6, 8, 12, 16, 20],
colors="k",
linewidths=1,
)
plt.clabel(cp, fmt=r"%1.0f")
plt.plot(v, h / 1000, linewidth=3)
plt.xlabel(r"Velocity, $v$ (ft/s)")
plt.ylabel(r"Altitude, $h$ (1000 ft)")
plt.xlim(0, 1800)
plt.ylim(-0.3, 65)
plt.grid()
plt.tight_layout()
# altitude
plt.figure(2)
plt.plot(t, h / 1000)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Altitude, $h$ (km)")
plt.grid()
plt.tight_layout()
# velocity
plt.figure(3)
plt.plot(t, v)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Velocity, $v$ (m/s)")
plt.grid()
plt.tight_layout()
# flight path angle
plt.figure(4)
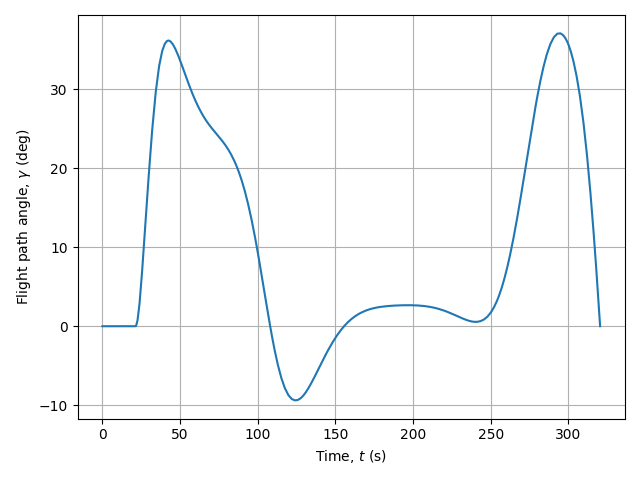
plt.plot(t, gamma * 180 / np.pi)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Flight path angle, $\gamma$ (deg)")
plt.grid()
plt.tight_layout()
# mass
plt.figure(5)
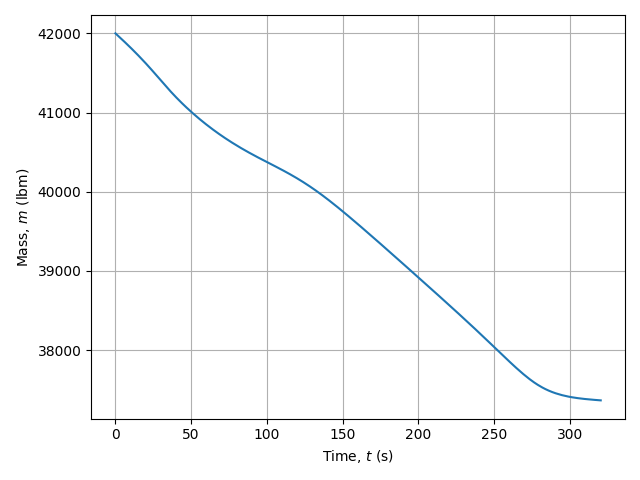
plt.plot(t, mass * 32.174)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Mass, $m$ (lbm)")
plt.grid()
plt.tight_layout()
# angle of attack
plt.figure(6)
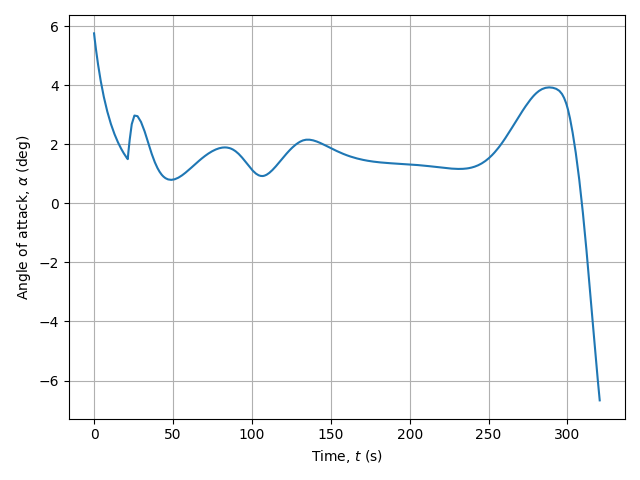
plt.plot(tc, alpha * 180 / np.pi)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Angle of attack, $\alpha$ (deg)")
plt.grid()
plt.tight_layout()
# figure 7: Hamiltonian
plt.figure(7)
plt.figure(7)
plt.plot(tc, hamiltonian)
plt.ylim(-1.001, -0.999)
plt.xlabel(r"Time, $t$ (s)")
plt.ylabel(r"Hamiltonian, $\mathcal{H}$")
plt.grid()
plt.tight_layout()
def main() -> None:
"""Demonstrate the solution of the minimum time to climb problem."""
problem = setup()
solution = problem.solve()
plot_solution(solution, plot_energy_contours=True)
plt.show()
if __name__ == "__main__":
main()
Text Output
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
Total number of variables............................: 1109
variables with only lower bounds: 0
variables with lower and upper bounds: 1049
variables with only upper bounds: 0
Total number of equality constraints.................: 900
Total number of inequality constraints...............: 1
inequality constraints with only lower bounds: 1
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
Number of Iterations....: 24
(scaled) (unscaled)
Objective...............: 1.6022938034016094e+00 3.2045876068032186e+02
Dual infeasibility......: 4.1771927406053216e-10 1.8656541916194012e-09
Constraint violation....: 2.1415007722680457e-09 2.1415007722680457e-06
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 1.1422025943058876e-11 2.2844051886117753e-09
Overall NLP error.......: 2.1415007722680457e-09 2.1415007722680457e-06
Number of objective function evaluations = 25
Number of objective gradient evaluations = 25
Number of equality constraint evaluations = 25
Number of inequality constraint evaluations = 25
Number of equality constraint Jacobian evaluations = 25
Number of inequality constraint Jacobian evaluations = 25
Number of Lagrangian Hessian evaluations = 24
Total seconds in IPOPT (w/o function evaluations) = 0.979
Total seconds in NLP function evaluations = 0.919
EXIT: Optimal Solution Found.
Plots
Optimal Trajectory
Also shown are contours of energy height (kinetic plus potential energy, divided by mass), and excess power (power available minus power required for level flight).
Altitude
Velocity
Flight Path Angle
Mass
Angle of Attack
Hamiltonian