Rosenbrock Function
For a solution to the Rosenbrock function minimization problem using a Python script instead of a notebook, see the Python script documentation.
Description
YAPSS is primarily an optimal control problem solver, but can solve parameter optimization problems as well — a parameter optimization problem is just an optimal control problem with no dynamics!
The cost function to be minimized is the Rosenbrock function [1],
is a function often used to test optimization algorithms. Because the function is the sum of two squares, it’s straightforward to verify that the Rosenbrock function has its global minimum at \(x = (1,1)\), since
The global minimum lies in a narrow parabolic-shaped valley, making the minimum difficult to find.
We can make a contour plot of the function using Matplotlib:
[1]:
import numpy as np
from matplotlib import pyplot as plt
x0 = np.linspace(-2, 2, 400)
x1 = np.linspace(-1, 3, 400)
x0_grid, x1_grid = np.meshgrid(x0, x1)
f = 100 * (x1_grid - x0_grid**2) ** 2 + (1 - x0_grid) ** 2
levels = [1, 3, 10, 30, 100, 300, 1000, 3000]
cp = plt.contour(x0, x1, f, levels, colors="black", linewidths=0.5)
plt.clabel(cp, inline=1, fontsize=8)
plt.plot(1, 1, ".r", markersize=5)
plt.xlabel(r"$x_0$")
plt.ylabel(r"$x_1$")
plt.xticks(range(-2, 3))
plt.yticks(range(-1, 4))
plt.tight_layout()
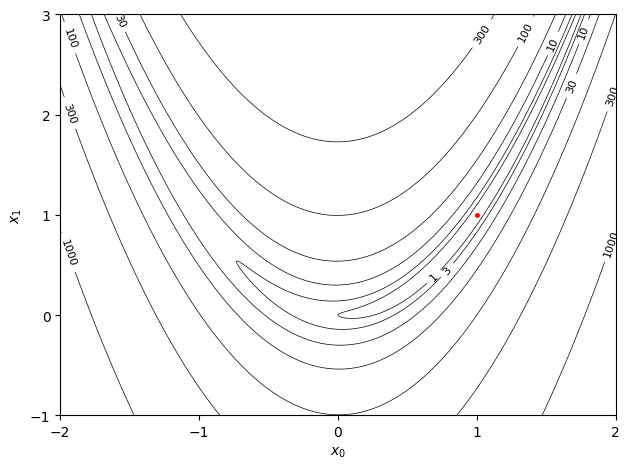
The minimum is marked by the red dot in the figure above.
YAPSS Solution
To find the minimum, first instantiate the problem with no phase and two parameters:
[2]:
from yapss import Problem
problem = Problem(name="Rosenbrock", nx=[], ns=2)
Define the objective function:
[3]:
def objective(arg):
x0, x1 = arg.parameter
arg.objective = 100 * (x1 - x0**2) ** 2 + (1 - x0) ** 2
problem.functions.objective = objective
Define the initial guess:
[4]:
problem.guess.parameter = [-2.0, 2.0]
For the optimization, use first and second derivatives of the objective function, found using automatic differentiation. Set the tol Ipopt option to 1e-10 (default is 1e-8).
[5]:
problem.derivatives.order = "second"
problem.derivatives.method = "auto"
problem.ipopt_options.tol = 1e-10
Set Ipopt options to control the amount of printout from Ipopt:
[6]:
# some output, but don't print iterations
problem.ipopt_options.print_level = 3
# suppress the Ipopt banner
problem.ipopt_options.sb = "yes"
# don't print out the Ipopt options
problem.ipopt_options.print_user_options = "no"
All that remains is to solve the problem:
[7]:
solution = problem.solve()
Total number of variables............................: 2
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 0
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
Number of Iterations....: 26
(scaled) (unscaled)
Objective...............: 0.0000000000000000e+00 0.0000000000000000e+00
Dual infeasibility......: 0.0000000000000000e+00 0.0000000000000000e+00
Constraint violation....: 0.0000000000000000e+00 0.0000000000000000e+00
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 0.0000000000000000e+00 0.0000000000000000e+00
Overall NLP error.......: 0.0000000000000000e+00 0.0000000000000000e+00
Number of objective function evaluations = 61
Number of objective gradient evaluations = 27
Number of equality constraint evaluations = 0
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 0
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 26
Total seconds in IPOPT (w/o function evaluations) = 0.011
Total seconds in NLP function evaluations = 0.013
EXIT: Optimal Solution Found.
We can print out the solution with the code:
[8]:
print(solution)
<yapss._private.solution.Solution> object
Name: Rosenbrock
Ipopt Status Code: 0
Status Message: Optimal Solution Found
Objective Value: 0.0
[9]:
x_opt = solution.parameter
print(f"The optimal solution is at the point x = {x_opt}")
The optimal solution is at the point x = [1. 1.]